决策树算法
关于经典决策树算法ID3、C4.5及CART树的部分细节梳理。
决策树
决策树可以从两个视角理解。
- If-Then规则的集合
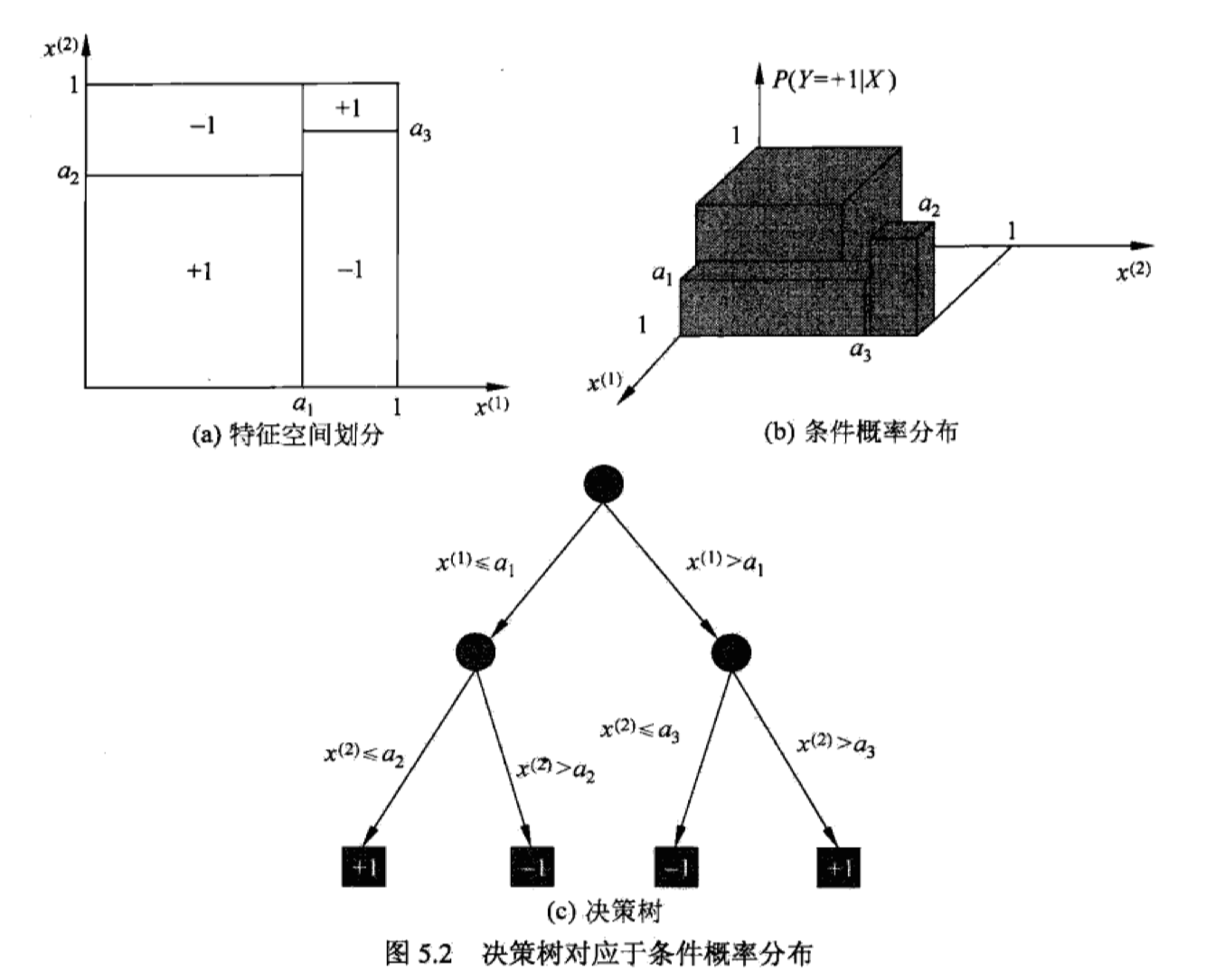
- 定义在特征空间与类空间上的条件概率分布
经典决策树对比
经典决策树有ID3、C4.5以及CART树,其功能和学习过程各有异同,简单对比。
| 算法 | 分裂标准 | 树类型 | 特征类型 | 缺失 | 剪枝 | 任务 |
|---|---|---|---|---|---|---|
| ID3 | 信息增益 | 多叉 | 离散 | No | 无剪枝 | 分类 |
| C4.5 | 信息增益比 | 多叉 | 离散/连续 | Yes | 有剪枝 | 分类 |
| CART | 基尼系数 | 二叉 | 离散/连续 | Yes | 有剪枝 | 分类/回归 |
一些其它差异
- C4.5优化ID3,主要体现在节点分支计算方式,解决ID3偏向取值较多的属性
- 特征使用,多分的ID3和C4.5分类变量只使用一次,CART可多次使用
- CART回归任务,用平方误差最小准则选特征,用样本点均值做回归预测值
C4.5如何处理连续特征
连续值不再有限,不能直接取其可能取值划分,可采用二分法(bi-partition)。给定样本集$D$和连续属性$a$,其有$n$个不同取值,从小到大排序得${a^1, a^2, \dots, a^n}$,则划分点可以依次选取测试
注意,与离散属性不同,若当前节点划分属性为连续特征,该属性还可作其为后代节点的划分属性。
如何剪枝
一般分为预剪枝和后剪枝两种。
- 预剪枝:决策树生成过程中,在节点划分前评估,若当前节点划分不能带来泛化性能提升,则停止划分并将当前节点标记为叶子节点
- 后剪枝:对完全生长的决策树,自底向上对非叶子节点考察,若将节点对应子树替换为叶子节点能带来泛化性能提升,则将子树替换为叶子节点
预剪枝降低过拟合风险,基于“贪心思想”,也会带来欠拟合的风险;后剪枝欠拟合风险小,但训练时间开销比未剪枝或预剪枝大的多。
如何处理缺失值
在XGBoost里,做法是这样的。在每个节点上都会将含缺失值样本往左右分支各倒流一次,然后计算对Objective的影响,选效果好的方向,作为缺失值应该流向的方向。
比如特征A(A>0或A<=0或A=null),那么首先忽略含缺失值样本,正常样本导流到到左子树与右子树;将含缺失值样本导向左子树,计算Objective_L;将含缺失值样本导向右子树,计算Objective_R。选择Objective较小的方向,作为缺失值应该分流的方向。
树何时终止生长
常见的几种终止条件有
- 叶子节点里样本类别都相同
- 叶子节点里样本数量少于某下限
- 树高度达某上限
- 分裂收益低于某下限
- 没有更多特征
附录信息
信息熵,表示随机变量的不确定性。
其中
条件熵,表示在已知随机变量$X$的情况下$Y$的不确定性。
其中
信息增益,表示得知特征$X$的信息使$Y$不确定的减少程度。熵$H(Y)$与条件熵$H(Y \mid X)$之差称为互信息。决策树学习中的信息增益等级于训练数据集中类与特征的互信息。
信息增益比,考虑信息增益相对值。训练数据经验熵较大时,信息增益偏大;信息增益偏向特征类别较多的特征。信息增益比有所矫正。
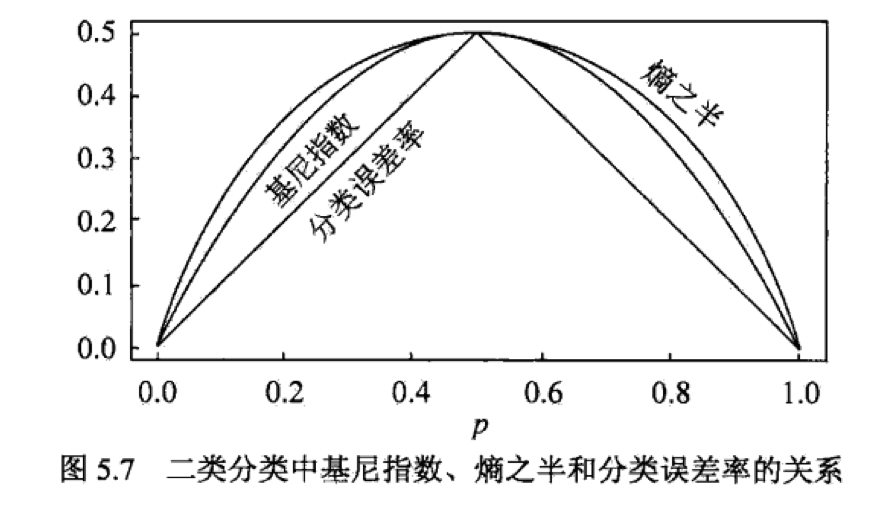
基尼系数,表示一个随机变量变为其对立事件的概率,也可以衡量随机变量的不确定性。
如图,基尼系数和熵之半很接近,都可以近似代表分类误差率。